www.mcgs.cn

plc与智能机器人通讯编程
1,添加项目SIMATIC S7-1200 cpu 1214c DC/DC/DC 版本V4.2
2,属性PROFINET接口
3,IP地址192.168.8.91
4,系统和时钟存储器都打开
5连接机制打开
6,程序块,添加新块,机器人通讯函数快,添加DB块,前两个为机器人和POC交互的原始数据
后两个为转换word数据
原始数据:机器人的自定义的word数据以及机器人的dword数据,机器人的轴数据,速度,加速度,x,y,z,坐标值,模式与状态
7,第一个为要读取的数据,接着点机器人通讯数据,编译会看到偏移量,点击第二个,机器人要读取的地址为0到256,长度固定
第三个为机器人收到POC发送的数据其中第一种为自定义的word型数据第二种为自定义的dword行的数据‘从256到356
8,回到机器人通讯,选项,找到通讯找到开放式用户通讯,点击TSEND-C点击DB多重实例会出线一个图形,接着点击TRCV-C同样点击多重实例,上面那个图形REQ正常10赫兹CONNECT通过组态来获得伙伴点击未指定,连接数据,新建。地址后面的那一格空白,填之前的地址为8.103,伙伴端口为10000
再返回之前的图形点击DATA填写p#DB14.14.DBx256.
0 BYTE 104
上面这个为机器人要写的数据
下面为机器人poc获取到的数据
下面这个图形同样通过组态来获得机器人取得参数,连接数据为和上一个一样的连接数据
EN-R填为1,DATA填p#DB14.DBx0.0BYTE256
到这里机器人通讯就完成了
9因为机器人和POC的数据位是相反的,因此要写一段数据转换
点击程序段2,点击插入SCL程序段,点击机器人通讯数据【DB 14】数据转化的内容为把机器人读取的数据经过高低位转换之后数据类型给转换过后的数据把你写的是数据经过高低位转换以及数据类型转换然后写到这个机器人自定义的数据里PLC-CMO-FOR-RB就是word以及dword类型的(就是要编程一段代码到刚才插入的SCL程序段里)
模式:1为写0为读
PLC与虚拟仿真模块通讯编程
1,修改计算机IP地
2,新建MCD通讯数据块
3,编写通讯程序并下载
4,进行外部信号配置
5,进行信号映射
6,通讯测试
7
plc射频系统读写编程应用
1,新建GVL数据块
2,新建RFID数据块,并取消【优化的块访问】,生成偏移量
3调用【MB-CLENT】模块,并输入参数
4程序保存,下载
5,RFID读写数据验证
plc与伺服驱动控制编程
1,设备组态
2,驱动程序编写
3,输入硬件标识符
4,程序编译,下载
5,报警清除
6,点动模式
7,绝对定位
8,相对定位
智能装配单元
1,创建型项目
2,添加CPU模块
4添加子网/IP地址
5启用系统和时钟存储器
6启用【连接机制】
7添加PLC扩展模块
8,修改输入输出的起始地址
9,保存程序并进行程序下载
10,转至在线查看组态是否正确
plc组态-智能仓库单元(括号里面为点击)
1,添加cpu模块(添加新设备)控制器从cpu
2添加子网/修改地址(属性,以太空网址,添加子网)
3,启用系统和时钟存储器
4,启用【连接机制】
5,添加零点IO【CN8032】模块
6,分配IO控制器
7修改通讯模块IP地趾
8添加扩展模块
9保存项目/程序下载
10转至在线查看组态是否zheng'qu
第7页
视觉系统:
1,对工件进行识别,将数据反馈给机器人
2,识别内容:位置,角度,颜色等
托盘流水线:
1,皮带机 2,气缸,传感器,RFID
软件介绍
生产流程管理系统:MES系统
仓库管理系统:WMS系统
数据采集与监视控制系统:SCADA云平台
先搞懂,软件的全部gong'neng
检测装配单元硬件地址配置表显示不出来啊。
一.添加控制器1200,型号1214 DCDCDC
PLC属性:1.接口,修改ip地址
2.启用系统时钟存储器
3.连接机制,允许远程对象通信访问
添加AGV通讯函数快(其他 MODBUS TCR)
添加数据快(优化快的访问关掉)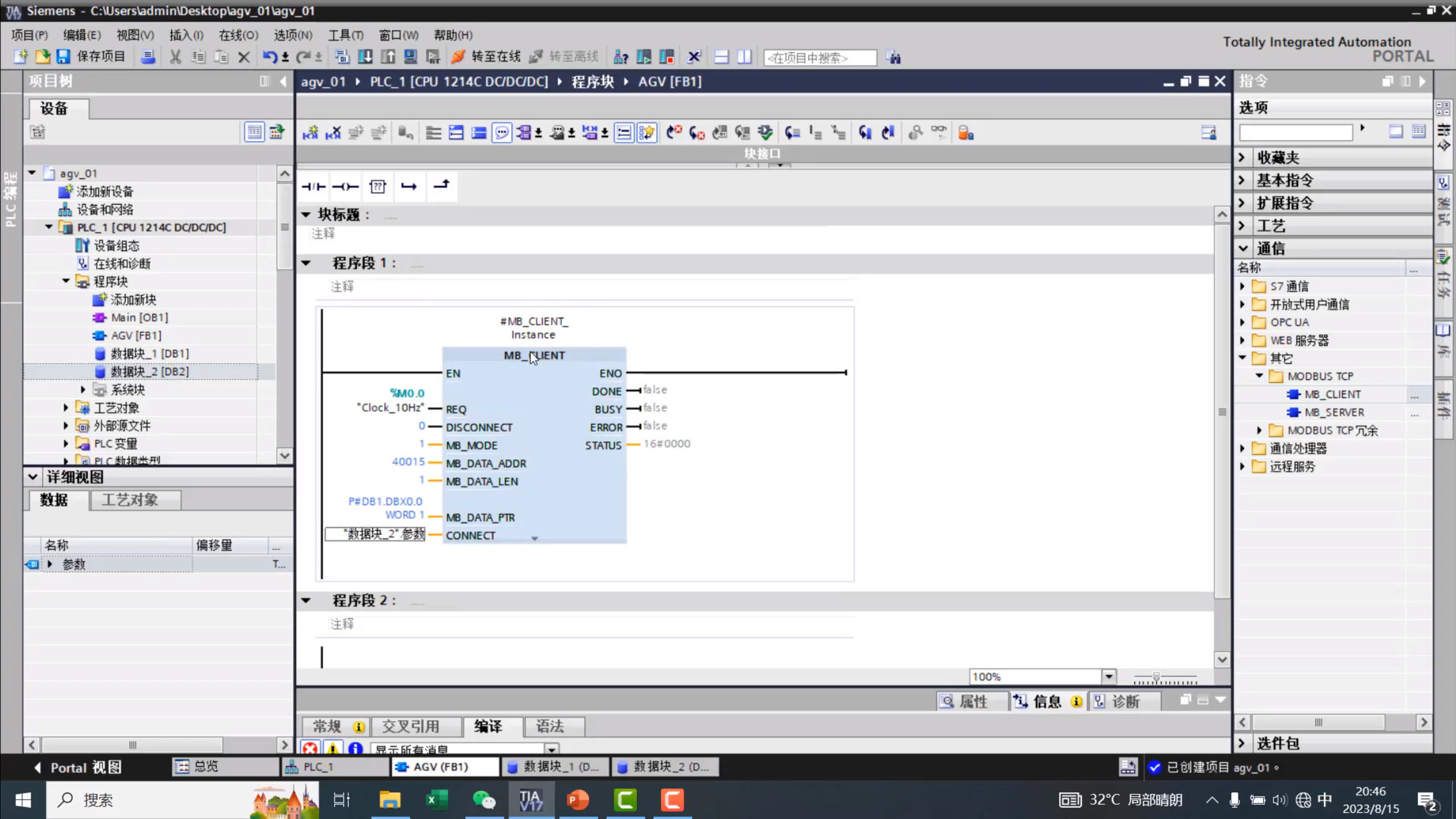
mes 生产执行系统{人力/设备/物料/工艺管理
有点东西
TCON_IP_V4
dd array int
xx array int
du int
xu int
先写上数,然后将xu为1时,在将xu为0,然后在将du为1,则写上了。
讐金
浩宇5 b。